GNSS および携帯無線通信網を活用した踏切制御システムの試験走行について
2020-09-03 東日本旅客鉄道株式会社
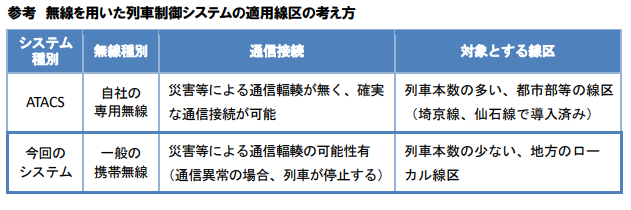
○ JR 東日本では、GNSS 及び携帯無線通信網を活用し、ローカル線への展開を目指した新しい列車制御システムの開発を進めています。
○ 本システムは、踏切制御機能と列車の速度制御機能を、最新の ICT 技術と汎用技術を活用して実現する世界初のシステムで、安全性の向上と設備の大幅なスリム化が可能となります。
〇 本システムの踏切制御機能について、実車による走行試験を 9 月から八高線にて開始します。
※GNSS(Global Navigation Satellite System / 全地球航法衛星システム)は、GPS やみちびき(準天頂衛星:QZSS)などの衛星を用いた位置測位システムの総称で、衛星からの情報を用いた列車位置の決定に活用します。
1.GNSS および携帯無線通信網を活用した列車制御システム(ローカル線向け)のコンセプト
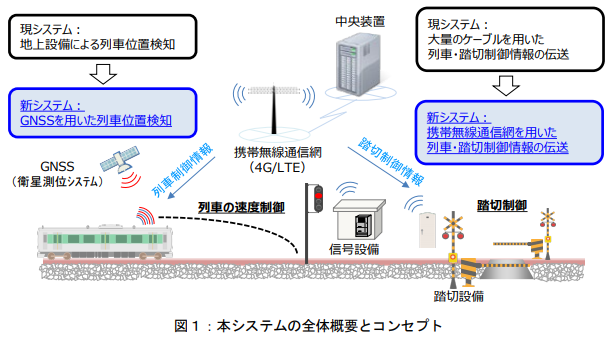
今回開発している列車制御システムは、GNSS を用いて列車の位置を把握し、携帯無線通信網を活用した地上・車上間の情報伝送により、踏切制御および列車の速度制御を行う世界初のシステムとなります。このシステムは、列車運行の安全性向上と、列車制御システムの大幅なスリム化を同時に実現するもので、ローカル線への導入・展開を目指していきます。
2.今回走行試験を行う踏切制御機能の概要
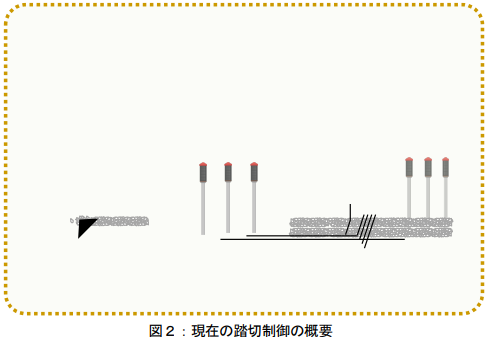
現在の踏切は、列車の位置を検知する地上装置と、情報伝送用のケーブルや異常を知らせる信号機など、多くの地上設備により構成されています。
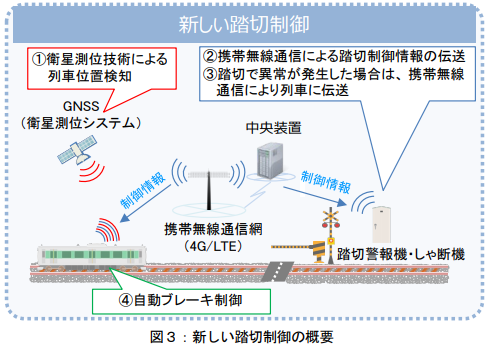
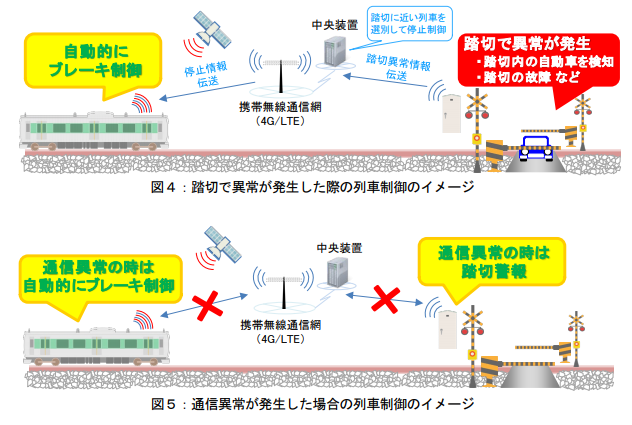
今回、試験を行う本システムの踏切制御機能は、GNSS により列車の位置を車上で把握し、列車と地上設備間の伝送装置に携帯無線通信網を活用するもので、最小限の地上設備により踏切制御を実現します。また踏切で異常が発生した場合には、無線通信により列車を自動的に停止させることで、衝突事故等を防止し安全性の向上を図ります。
今回の走行試験では、実用化に向けて、無線伝送の安定性と GNSS による位置測位の精度の確認を行うとともに、システム動作の安全性を検証します。
3. 期待される効果
(1)安全・安定輸送のさらなる向上
・ 無線伝送技術の活用により、踏切の異常時には列車に対して自動的にブレーキ制御を行うことが可能となり、踏切の安全性が大幅に向上します。また、通信に異常が発生した場合においても、列車を自動的にブレーキ制御するとともに踏切での警報を行います。
・ 線路沿線の設備の削減により、設備の故障が大幅に減少し、輸送の安定性が向上します。
例)踏切制御子・特殊信号発光機やケーブルの故障による輸送影響の削減
台風などの災害後、確認設備の大幅な削減による運転再開の迅速化 など
(2)コストの削減
線路沿線の設備の削減に伴い、踏切制御に関わる初期投資およびメンテナンス費用の 20%程度の削減を目指しています。
4. 走行試験の概要と開発のスケジュール
2020 年 9 月~2021 年 1 月に八高線 高崎駅~高麗川駅間で走行試験を行います。その後、試験結果の評価を行い、2024 年度の導入を目指します。なお、列車の速度制御機能については 2021 年度の試験を予定しています。