国総研レポート2020(研究期間 : 平成 29 年度~令和元年度)
国土技術政策総合研究所 道路交通研究部 高度道路交通システム研究室
主任研究官(博士(工学)) 井坪 慎二
研究官 岩里 泰幸
室長(博士(工学)) 関谷 浩孝
(キーワード) 道の駅,自動運転,実証
1.はじめに
国土交通省では、内閣府戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)において、高齢化が進行する中山間地域における人流・物流確保のため、「道の駅」等を拠点とした自動運転サービスの社会実装を目指し、平成29年度より実証実験を実施している。平成29年度は全国13箇所で実証実験を実施し、その後5箇所を追加し、これまで全国18箇所で実験を行った。
2.円滑な自動運転に向けた分析
本実証実験において使用した自動運転車両は公募を行い、4車両が選定された(一例を図-1に示す)。これらの車両はあらかじめセットされた軌跡通りに走行を行うが、路上駐車など走路上に障害物がある場合には、センサで検知を行い停止、または人間がハンドル操作を行い障害物等を回避する。後者の「手動介入等」と呼ぶ操作を削減することが円滑な自動運転の実現に繋がる。このため、国総研では手動介入等が発生している要因を分析し、対策を立案した。本稿ではその概要について紹介する。詳しくは参考文献1)を参照されたい。
手動介入等の分析にあたっては、手動介入等が発生した時間や場所と要因について、運行日報やドライバーへのヒアリング、車載ドライブレコーダーを設置し取得した映像等と照合することで、把握を行った。
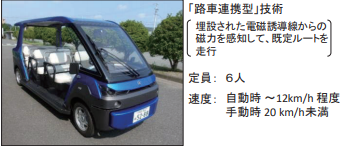
図-1 実験に用いた車両の一例(カートタイプ)
3.手動介入等の分析結果
平成29年度に実施した13箇所の実験における手動介入等の発生状況を以下に示す。それらの走行について、手動介入等により自動走行が継続出来なかった事象の内訳を図-2に示す。
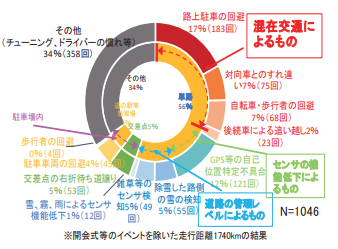
図-2 手動介入等の発生状況
図-2によると、手動介入等は混在交通によるもの、センサの機能低下によるもの、道路管理レベルによるものに大別できる1)。
手動介入等で最も多かったのが、図-3のように走路上の路上駐車車両の回避によるものである。

図-3 走路上の路上駐車
また沿道の民地等からの走路上への植栽の繁茂や、道路脇への除雪により幅員が狭くなり車両センサが障害物として検知して、走行停止や手動運転で回避する場合があった(図-4)。これは、自動運転のスムーズな運行には、適切な幅員の確保の必要性や、適切な管理レベルの必要性を示していると考えられる。
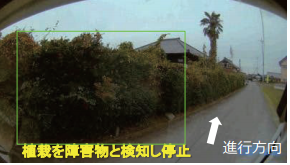
図-4 植栽の障害物としての検知
4.手動介入等を減少させるための対策の立案
このような手動介入等の状況を踏まえ、円滑な自動運転車の走行のためには、以下の様な対策が必要であると考えられる1)。
(1) 走行空間の確保、退避場所の設定
(2) 道路管理レベルの向上
(3) 事故位置特定のインフラ支援
例えば(1)走行空間の確保については、路上駐車の抑制や歩行者動線との完全分離等の工夫が必要である。路面標示による対策例のイメージを図-5に示す。その他、自動運転車の待避スペースを設置して後続の一般車が円滑に追い越しを行うことができるようにすることが必要である。

図-5 走行空間確保の例
また(2) 道路管理レベルの向上については、沿道の民地等の植栽や道路脇の除雪塊等の影響については、地元とも協力し自動運転を考慮した道路管理レベルの設定や、除雪や積雪時を考慮した走行位置の設定が必要と考えられる。特に除雪については費用もかかることから、沿道の住民との協力が不可欠である。
5.おわりに
国総研による本分析と対策の立案をふまえて、自動運転に対応した道路空間に関する検討会の中間とりまとめが作成された2)。また上小阿仁村では、自動運転サービスの社会実装に向けた取組が進んでいる。今後の社会実装の拡大に向けて技術支援を引き続き行っていく。
☞詳細情報はこちら
1) 第60回土木計画学研究発表会 No.7172実証実験を通じた中山間地域における自動運転の課題と対応についての分析
2) 自動運転に対応した道路空間に関する検討会中間とりまとめ
https://www.mlit.go.jp/road/ir/ircouncil/road_space/pdf/chu-matome.pdf

