
車両前方のステレオカメラによる障害物検知システムの開発
2022-02-08 東日本旅客鉄道株式会社
○ JR 東日本では、変革のスピードアップを目指し、技術イノベーションに取り組んでいます。その中で、列車の安全性向上や将来のドライバレス運転で必要とされる技術開発として、車両前方にステレオカメラを搭載して障害物をリアルタイムで自動検知するシステムを JR 東日本研究開発センターの先端鉄道システム開発センターが開発しています。
○ これまでは、車両に適したカメラの開発や画像処理の精度向上のため、首都圏で走行試験を行いましたが、2022 年度にはカメラと画像処理装置の小型化開発を行い、走行試験を実施します。その後、2023 年度から営業列車へ搭載して通常走行時のデータの蓄積、機能改善を継続することで、本システムを乗務員の運転支援や将来のドライバレス運転に適用することを目指します。
1.開発の目的・背景
乗務員を支援するためのシステムや、将来のドライバレス運転など次世代の運転のあり方を考えたときに、安全確保の手段として車両前方の障害物を事前に検知する必要があります。このため JR 東日本では、ステレオカメラを用いた障害物検知システムの開発を行っています。

障害物検知システムによる検知動作の流れ ステレオカメラの設置位置
2.障害物検知システムの特徴
• 車両の前方に搭載した2台のカメラ画像から、画像処理装置がステレオカメラの技術を用いて画像解析を行い、物体までの距離を計算することにより、列車が走行する線路内の障害物をリアルタイムに検知します。
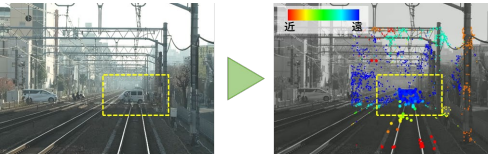
カメラで撮影した画像 画像解析により距離を計算
• 自動車などにおいて前方の障害物検知システムは実用化されていますが、鉄道車両の場合、列車を停止させるまでの距離が自動車と比較して長いことから、より遠方の障害物を検知する必要があります。開発したカメラおよび画像処理装置を用いた走行試験において、遠くまで撮影した画像を解析することにより物体までの距離が計算できることを確認しています。
• 鉄道車両に適した専用カメラを開発し、車両の揺れによる影響が少ない画像を得ることができ、障害物の誤検知が少なくなりました。また、トンネルや夜間など、明るさの変化に対応できる画質調整も可能になりました。カメラと画像処理装置で機能を分担することにより、障害物を検知する処理速度が向上しました。
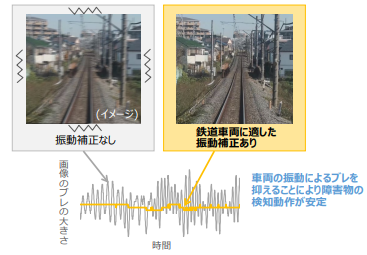
専用カメラを用いた振動補正の効果イメージ
• 本システムを MUE-Train※や、京浜東北・根岸線の車両に搭載し、2020 年 2 月から本線上で走行試験を行っています。試験では、カメラや画像処理装置の性能調整を行い、首都圏において車両前方の障害物検知が可能なシステムになるよう開発を進めています。
※MUltipurpose Experimental Train(多目的試験車) 209 系電車を改造した在来線用試験電車
3.今後の予定
首都圏におけるさまざまな場所での試験を行い、さらなる性能向上に向けた開発を継続することで、本システムを安全性向上につながる乗務員の運転支援やドライバレス運転に適用することを目指します。
](https://construction.tiisys.com/wp-content/uploads/2021/12/nishinihon-500x165.png "西日本旅客鉄道株式会社 山口線の重大インシデント[車両障害](令和2年12月30日発生)")
")