
2019-12-09 新エネルギー・産業技術総合開発機構,株式会社竹中工務店,中央大学
NEDOは、将来の国家プロジェクトなどに繋がる有望な技術の原石を発掘するための先導研究プログラムを実施しており、(株)竹中工務店、中央大学と共同で、世界で初めて土砂の搬送が可能なぜん動ポンプを開発し、試験機を完成させました。
ぜん動ポンプは、腸のぜん動運動を機械的に模倣しており、加圧機構が経路上に分散して配置され、対象物を外部から遮断された状態で搬送するため、エネルギー損失が小さく、持ち上げられる高さに理論上の限界がありません。従来のぜん動ポンプは、流動性の高い液体・粘体やスラリー(液体と固体粒子との懸濁液)への適用はありましたが、これまで流動性が低い土砂には適用されていませんでした。
今回、土砂の粒子の性状・含水比・搬送特性の関係を分析し、ゴムチューブの形状の工夫や含水比を調整できる機構を設けることで、土砂の搬送が可能なぜん動ポンプの試作機を完成させることができました。これにより、将来的には、大深度・海底や月面などの極限環境での掘削・運搬作業への適用が期待されます。
本試験機は、2019年12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展」の中央大学ブースにおいて展示される予定です。
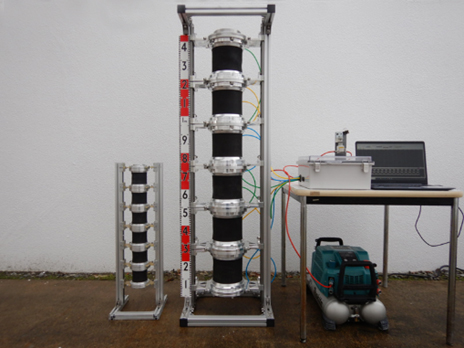
図1 土砂搬送用ぜん動ポンプ(左:小型機 右:大型機)
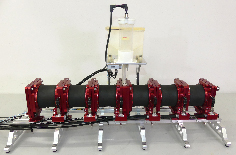
ぜん動ポンプによる土砂搬送の様子
土砂搬送用ぜん動ポンプによる土砂搬送実験(YouTube)
1.概要
効率的な土地利用が求められる大都市圏では、建物の地下が深くなるため、掘削工事に全体工期が大きく左右される傾向があります。また、建設現場の働き方改革が求められている社会情勢もあり、生産性向上を目的とした掘削物搬送装置の効率向上が喫緊の課題となっています。従来、大深度の掘削工事はクラムシェル※1やテルハ※2と呼ばれる大型重機が用いられています。大型重機には、その重量を支える広く強固な作業台が必要で、ワイヤーの長さなどにより搬送深さの最大が70m程度であり、また深くなるにつれて掘削物の搬送時間が長くなり搬送効率が減少するという課題があります。また、これらの重機は地上での運用を前提としているため、海底や真空中の月面などの極限環境で搬送を行うことは困難です。
こうした背景から、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)は、株式会社竹中工務店、学校法人中央大学中村研究室と共同で、腸のぜん動運動※3を機械的に模倣したぜん動ポンプの研究開発を実施しています。
ぜん動ポンプは、図2(b)に示すポンプ単体ユニットが複数連結することで構成されます。単体ユニットは、図2(c)に示すように外側の人工筋肉と内側のゴムチューブがフランジで接合され、両者の間に空気チャンバーが形成される構造となっています。このチャンバーに外部から空気圧を加えることで、人工筋肉が半径方向の外側に膨張、軸方向に収縮すると同時に、ゴムチューブが内側に膨張して管路を閉塞します。このように、人工筋肉とゴムチューブによって腸のぜん動運動を再現します。
ぜん動ポンプは、加圧機構が経路上に分散して配置され、対象物を外部から遮断された状態で搬送するため、外部環境から受ける影響とエネルギー損失が小さく、深さに関係なく搬送効率が一定で、持ち上げられる高さに理論上の限界が無いことが特徴です。これらの特徴に着目して、世界で初めて建設現場の土砂の搬送に適用することを試みました。
(a)ぜん動ポンプ
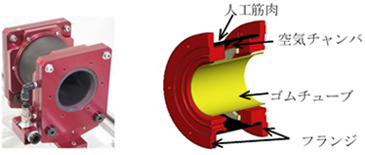
(b)ポンプ単体ユニット(c)断面図
図2 ぜん動ポンプの構成
今般、NEDO、(株)竹中工務店、中央大学は、世界で初めて、土砂の搬送が可能なぜん動ポンプの試験機を完成させました。今回完成させた試験機は、小型機と大型機の2タイプで、大型機は小型機の直径を2倍としただけでなく、実際の現場での運用を見据えた各種改良を施しました。
今後は、両タイプを利用してスケール効果※4の検証や制御の最適化などの技術課題を解決し、将来的に、大深度・海底や月面などの極限環境での掘削作業が可能な土砂搬送デバイスの実用化を目指します。
本試験機は、2019年12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展※5」の中央大学ブースにおいて展示される予定です。
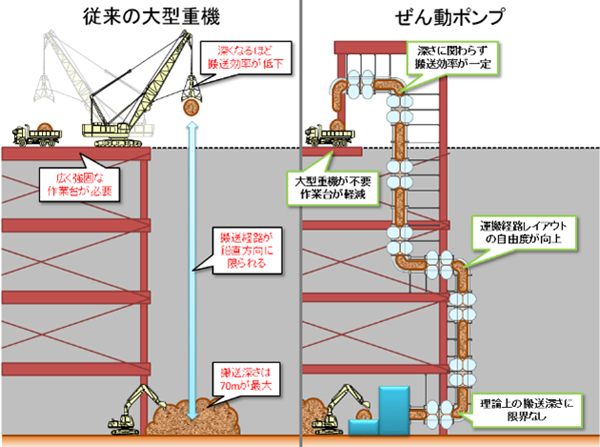
図3 ぜん動ポンプと従来の大型重機との比較と実用化イメージ
2.今回の成果
土砂をぜん動ポンプで搬送するためには、土砂の粒子の性状と含水比で異なる搬送抵抗をどのように緩和させるかが課題でした。そこで、土砂の粒子の性状・含水比・搬送特性の関係を分析し、土砂の締め固まりによる搬送抵抗を緩和するようゴムチューブの形状に工夫を加え、搬送経路上で含水比を調整できる機構を設けることで、土砂の搬送を可能にしました。
また、土砂搬送ぜん動ポンプは、小型機と、直径が2倍の大きさの大型機をそれぞれ製作しました。大型機は、スケール効果と容量増加の相乗効果により、小型機の8倍以上の容積土砂を搬送が可能です。また、大型機は単なる大型化だけにとどまらず、連結部材の削減・部材形状の簡素化・ユニット交換の省力化・フレームの目詰まり防止、人工筋肉とゴムチューブの耐久性を考慮した再設計など、建設現場での実際の運用を見据えた各種改良を施しました。また、ぜん動ポンプの制御プログラムとインターフェースも併せて開発することで、柔軟な動作を容易に制御することが可能になりました。
3.今後の予定
今後、試運転を経て、搬送効率に対するスケール効果の検証や制御の最適化などの技術課題を解決するための実験を2020年6月末まで実施するとともに、ポンプ内部のセンシングとそれに連動した自動制御システムの開発による更なる搬送効率の向上を目指します。
なお、本試作機の設計・製作は株式会社ソラリスが実施しています。(株)ソラリスは中央大学発ベンチャー企業で、将来の事業化を予定しています。
【注釈】
- ※1 クラムシェル
- 建設機械の一種で、長いブームからワイヤーロープでつり下げたバケットを、二枚貝のように開閉して土砂をつかんで掘削し、河床や建物の地下の掘削に使用される。
- ※2 テルハ
- クレーンの一種で、レール上をワイヤーの巻き上げ・巻き下げを行う機械(ホイスト)が移動する。
- ※3 腸のぜん動運動
- 腸は縦走筋と輪状筋という2種類の筋肉で構成され、これらの動きを組み合わせて収縮・弛緩運動を行います。食塊の接触により輪状筋が収縮し腸を閉塞させ、縦走筋がタイミングよく収縮することで食塊を前進させます。この動作を繰り返すことで、腸は小さな力で食塊を連続的に混合・搬送しています。
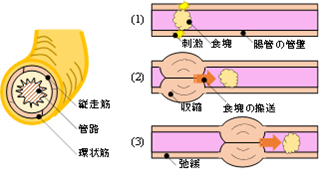
(a)腸の構造(b)ぜん動運動による搬送
図4 腸のぜん動運動
- ※4 スケール効果
- 物の大きさが変化すると、その物に作用する力などの大きさ・比が変わることで、挙動が変化する現象。
- ※5 2019国際ロボット展
- 会場:東京ビッグサイト 青海・西・南ホール
開催期間:2019年12月18日~21日
ウェブサイト: 2019国際ロボット展
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:平野、大岡
原理・制御・人工筋肉について
中央大学 研究支援室 担当:矢ヶ崎
工事への適用・その他について
(株)竹中工務店 東京本店技術部 担当:上田
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、中里

